介绍
关于 ICP 和 NDT 的算法原理可以参考:激光 SLAM 点云配准 - 基于 ICP 及其变种的方法,激光SLAM 点云配准 - 基于相关性的方法。这篇博客主要整理 ICP 的实现过程,以及最后和 PCL 库自带的 ICP 和 NDT 算法接口进行比较。测试框架是基于任乾大佬的 localization_in_auto_driving 进行魔改 :)。主要是为了方便在同一个环境下测试各类算法效果。代码在:General Mapping and Localization Framework
基于 SVD 分解进行 ICP 配准
算法原理可以参考之前写的博客,这里直接列出相关代码:
/// 设置 ICP 匹配参数,主要包括:最大关联距离,相邻两次迭代间的最大接收位姿变化程度以及匹配得分变化,以及最大迭代次数
bool ICPRegistration::SetRegistraionParam(float max_correspodence_dist,
float trans_eps,
float fitness_eps,
int max_iter) {
param_.max_correspodence_dist = max_correspodence_dist;
param_.trans_eps = trans_eps;
param_.fitness_eps = fitness_eps;
param_.max_iter = max_iter;
return true;
}
/// 设置匹配目标点云,用于建立 KD 树方便后续快速搜索最近点
bool ICPRegistration::SetInputTarget(const CloudData::Cloud_Ptr& input_target) {
target_kd_tree_ptr_->setInputCloud(input_target);
return true;
}
/// 进行 SVD 分解进行 ICP 配准,获得两个点云之间的相对位姿变化
bool ICPRegistration::MatchWithSVD(const CloudData::Cloud_Ptr& input_source,
const Eigen::Matrix4f& predict_pose,
Eigen::Matrix4f& result_pose)
{
Eigen::Matrix4f esitimated_pose = predict_pose;
bool converge = false;
int iter = 0;
// keep updating pose until converge or reach max iteration
while (iter < param_.max_iter && !converge) {
iter++;
CloudData::Cloud transformed_cloud;
pcl::transformPointCloud(*input_source, transformed_cloud, esitimated_pose);
std::vector<float> source_points_xyz;
std::vector<float> target_points_xyz;
// 预留足够空间,避免频繁空间分配
source_points_xyz.reserve(transformed_cloud.points.size() * 3);
target_points_xyz.reserve(transformed_cloud.points.size() * 3);
// 循环的过程同时计算上一次迭代最后的每个点平均关联距离
float score = 0.0;
for (size_t i = 0; i < input_source->points.size(); ++i) {
const CloudData::Point& transformed_point = transformed_cloud.points[i];
std::vector<int> indices(1);
std::vector<float> distances(1);
target_kd_tree_ptr_->nearestKSearch(transformed_point, 1, indices, distances);
score += distances[0];
if (distances[0] > param_.max_correspodence_dist) continue;
source_points_xyz.push_back(input_source->points[i].x);
source_points_xyz.push_back(input_source->points[i].y);
source_points_xyz.push_back(input_source->points[i].z);
target_points_xyz.push_back(target_kd_tree_ptr_->getInputCloud()->points[indices[0]].x);
target_points_xyz.push_back(target_kd_tree_ptr_->getInputCloud()->points[indices[0]].y);
target_points_xyz.push_back(target_kd_tree_ptr_->getInputCloud()->points[indices[0]].z);
}
// condition 1: fitness score converge -- 匹配距离收敛
score /= (transformed_cloud.points.size());
if (std::fabs(score_ - score) < param_.fitness_eps) {
converge = true;
break;
}
score_ = score;
// 使用 Eigen::Map 来避免多余空间使用
Eigen::Map<Eigen::Matrix3Xf> source_points(source_points_xyz.data(), 3, source_points_xyz.size() / 3);
Eigen::Map<Eigen::Matrix3Xf> target_points(target_points_xyz.data(), 3, target_points_xyz.size() / 3);
Eigen::Vector3f source_mean = source_points.rowwise().mean();
Eigen::Vector3f target_mean = target_points.rowwise().mean();
source_points.colwise() -= source_mean;
target_points.colwise() -= target_mean;
Eigen::Matrix3f H = source_points * target_points.transpose();
Eigen::JacobiSVD<Eigen::Matrix3f> svd(H, Eigen::ComputeFullU | Eigen::ComputeFullV);
Eigen::Vector3f prev_translation = esitimated_pose.block<3, 1>(0, 3);
Eigen::Matrix3f updated_rotation = svd.matrixV() * svd.matrixU().transpose();
Eigen::Vector3f updated_translation = target_mean - updated_rotation * source_mean;
esitimated_pose.block<3, 3>(0, 0) = updated_rotation;
esitimated_pose.block<3, 1>(0, 3) = updated_translation;
// condition 2: translation converge -- 这里只比较了平移没有考虑旋转的变化程度
if ((updated_translation - prev_translation).squaredNorm() < param_.trans_eps) {
converge = true;
}
}
result_pose = esitimated_pose;
return true;
}
基于高斯牛顿法进行 ICP 配准
高斯牛顿法和过程和 SVD 大同小异,区别在于不适用 SVD 分解获得最优估计位姿,而是通过高斯牛顿法尝试取降低匹配残差。这里对每一个点的残差函数为:
$$
\boldsymbol{e} = \boldsymbol{Rp}_i + \boldsymbol{t} - \boldsymbol{p}'_i
$$
其中,$\boldsymbol{R}, \boldsymbol{t}$ 为当前帧相对于匹配目标(上一帧点云或者局部地图)的位姿,$\boldsymbol{p}_i$ 为当前帧点云中的一个点,$\boldsymbol{p}'_i$ 为匹配目标中和 $\boldsymbol{p}$ 关联的一个点,这里我们取最近点作为关联点。
根据高斯牛顿法需要求出残差对优化变量($\boldsymbol{R}, \boldsymbol{t}$)的雅可比矩阵,对旋转矩阵使用右扰动模型求解,推导过程参考:一些常见的关于旋转的函数对旋转求导过程的推导,下面直接给出结果:
$$
\begin{aligned}
\frac{\partial\boldsymbol{e}_i}{\partial\boldsymbol{R}} &= -\boldsymbol{Rp}^\wedge\\
\frac{\partial\boldsymbol{e}_i}{\partial\boldsymbol{t}} &= \boldsymbol{I}\\
\boldsymbol{J}_i &= \begin{bmatrix}
\frac{\partial\boldsymbol{e}_i}{\partial\boldsymbol{R}} & \frac{\partial\boldsymbol{e}_i}{\partial\boldsymbol{t}}
\end{bmatrix} \in \mathbb{R}^{3\times 6}
\end{aligned}
$$
因此,正规方程(Normal Equation) 为:
$$
\begin{aligned}
\boldsymbol{H}\delta\boldsymbol{x} &= \boldsymbol{b}\\
\boldsymbol{H} &= \sum_{i}\boldsymbol{J}_i^T\boldsymbol{J}_i \in \mathbb{R}^{6\times6}\\
\boldsymbol{b} &= -\sum_{i}\boldsymbol{J}_i^T\boldsymbol{e}_i \in \mathbb{R}^{6\times1}
\end{aligned}
$$
求解正规方程,对状态量进行迭代即可,这里注意由于我们使用的是右扰动模型求解,因此更新旋转时也应该右乘迭代量:
$$
\begin{aligned}
\boldsymbol{R}' &= \boldsymbol{R}\exp{(\delta\boldsymbol{x}_{0:2})}\\
\boldsymbol{t}' &= \boldsymbol{t} + \delta\boldsymbol{x}_{3:5}
\end{aligned}
$$
高斯牛顿法和参数设置和目标设置代码和 SVD 一样,这里只列出核心匹配函数:
bool ICPRegistration::MatchWithGassianNewton(const CloudData::Cloud_Ptr& input_source,
const Eigen::Matrix4f& predict_pose,
Eigen::Matrix4f& result_pose) {
Eigen::Matrix4f esitimated_pose = predict_pose;
bool converge = false;
int iter = 0;
// keep updating pose until converge or reach max iteration
while (iter < param_.max_iter && !converge) {
iter++;
CloudData::Cloud transformed_cloud;
pcl::transformPointCloud(*input_source, transformed_cloud, esitimated_pose);
// 初始化 H, b
Eigen::Matrix<float, 6, 6> H = Eigen::Matrix<float, 6, 6>::Zero(); // J^TJ
Eigen::Matrix<float, 6, 1> b = Eigen::Matrix<float, 6, 1>::Zero(); // J^Te
// 对每个点计算在目标点云中的最近点,计算其雅可比和残差,构建 H,b
float score = 0.0;
for (size_t i = 0; i < input_source->points.size(); ++i) {
const CloudData::Point& transformed_point = transformed_cloud.points[i];
std::vector<int> indices(1);
std::vector<float> distances(1);
target_kd_tree_ptr_->nearestKSearch(transformed_point, 1, indices, distances);
const CloudData::Point& original_point = input_source->points[i];
const CloudData::Point& nearest_point = target_kd_tree_ptr_->getInputCloud()->points[indices[0]];
score += distances[0];
if (distances[0] > param_.max_correspodence_dist) continue;
Eigen::Vector3f source_pt(original_point.x, original_point.y, original_point.z);
Eigen::Vector3f transformed_pt(transformed_point.x, transformed_point.y, transformed_point.z);
Eigen::Vector3f target_pt(nearest_point.x, nearest_point.y, nearest_point.z);
// 计算雅可比矩阵
Eigen::Matrix<float, 3, 6> jacobian = Eigen::Matrix<float, 3, 6>::Zero();
jacobian.block<3, 3>(0, 0) = -esitimated_pose.block<3, 3>(0, 0) * Sophus::SO3f::hat(source_pt);
jacobian.block<3, 3>(0, 3) = Eigen::Matrix3f::Identity();
// 计算残差
Eigen::Vector3f resiual = transformed_pt - target_pt;
// 更新 H, b
H += jacobian.transpose() * jacobian;
b += -jacobian.transpose() * resiual;
}
// condition 1: fitness score converge
score /= (transformed_cloud.points.size());
if (std::fabs(score_ - score) < param_.fitness_eps) {
converge = true;
break;
}
score_ = score;
// 求解 Hx = b
Eigen::Matrix<float, 6, 1> delta_x = H.householderQr().solve(b);
// 更新 R, t
esitimated_pose.block<3, 3>(0, 0) *= Sophus::SO3f::exp(delta_x.block<3, 1>(0, 0)).matrix();
esitimated_pose.block<3, 1>(0, 3) += delta_x.block<3, 1>(3, 0);
// condition 2: transformation converge
if (delta_x.squaredNorm() < param_.trans_eps) {
converge = true;
}
}
// used final mean distance (across all points) as fitness score
result_pose = esitimated_pose;
return true;
}
PCL 库中的 ICP,NDT 接口
PCL 库中也自带了 ICP 和 NDT 的算法接口,下面简单介绍一下如何使用。
- PCL-ICP
大致来说也是分成四步:参数设置,目标设置,点云配准以及获取匹配残差,如下:
// 初始化 ICP 接口
icp_ptr_.reset(new pcl::IterativeClosestPoint<CloudData::Point, CloudData::Point>());
// 参数设置
icp_ptr_->setMaxCorrespondenceDistance(max_correspodence_dist);
icp_ptr_->setMaximumIterations(max_iter);
icp_ptr_->setTransformationEpsilon(trans_eps);
icp_ptr_->setEuclideanFitnessEpsilon(fitness_eps);
// 目标点云设置
// CloudData::Cloud_Ptr input_target; 获取目标点云,可以是上一帧点云,或者其他形式的点云地图
icp_ptr_->setInputTarget(input_target);
// 点云配准,获取匹配结果
// input_source (用来匹配的点云,通常是最新一帧点云)
// Eigen::Matrix4f predict_pose 预测位姿(初始值)
// CloudData::Cloud_Ptr result_cloud_ptr // 使用 ICP 估计后的位姿转换的匹配点云
// Eigen::Matrix4f result_pose ICP 最终位姿估计
icp_ptr_->setInputSource(input_source);
icp_ptr_->align(*result_cloud_ptr, predict_pose);
result_pose = icp_ptr_->getFinalTransformation();
score_ = icp_ptr_->getFitnessScore(); // 最后匹配残差(所有关联点对的平均距离)
- PCL-NDT
PCL 库中的 NDT 和 ICP 接口基本类似,如下所示:
// 初始化 NDT 接口
ndt_ptr_.reset(new pcl::NormalDistributionsTransform<CloudData::Point, CloudData::Point>());
// 参数设置,包括分辨率,迭代步长等
ndt_ptr_->setResolution(res);
ndt_ptr_->setStepSize(step_size);
ndt_ptr_->setTransformationEpsilon(trans_eps);
ndt_ptr_->setMaximumIterations(max_iter);
// 目标点云设置
// CloudData::Cloud_Ptr input_target; 获取目标点云,可以是上一帧点云,或者其他形式的点云地图
ndt_ptr_->setInputTarget(input_target);
// 点云配准,获取匹配结果
// input_source (用来匹配的点云,通常是最新一帧点云)
// Eigen::Matrix4f predict_pose 预测位姿(初始值)
// CloudData::Cloud_Ptr result_cloud_ptr // 使用 ICP 估计后的位姿转换的匹配点云
// Eigen::Matrix4f result_pose ICP 最终位姿估计
ndt_ptr_->setInputSource(input_source);
ndt_ptr_->align(*result_cloud_ptr, predict_pose);
result_pose = ndt_ptr_->getFinalTransformation();
ndt_ptr_->getFitnessScore(); // 最后匹配残差(所有关联点对的平均距离)
测试
接下来以 KITTI 数据集为例进行简单的测试,匹配大致流程为:
- 第一帧不进行匹配,初始化局部地图
- 在局部地图累计若干帧之前不对点云进行下采样,直接将点云转换至世界坐标系中加入局部地图
- 每一帧通过和局部地图进行匹配获得相对位姿变换,并计算其世界坐标
- 每一帧点云的初始位姿预测值,为上一帧点云的世界坐标与上一帧估计的相对位姿变化(即假设载体在进行匀速运动,因此每两帧之间的相对运动基本保持不变)
最后使用 EVO 将里程计获得的位姿和真值(GNSS)进行比较。
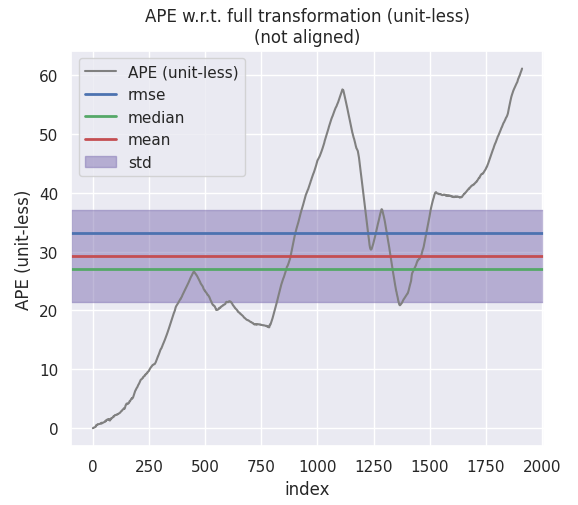
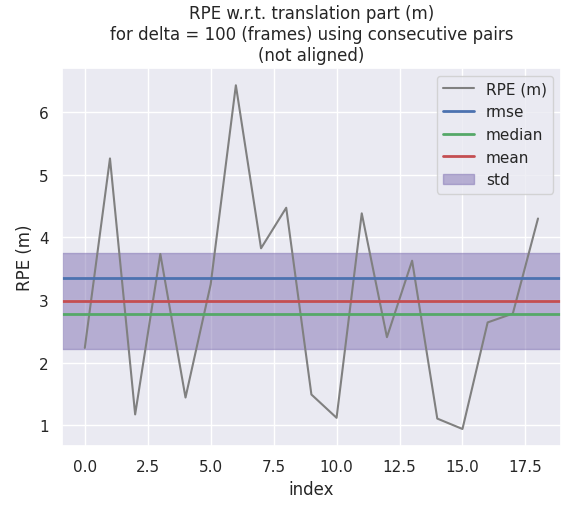
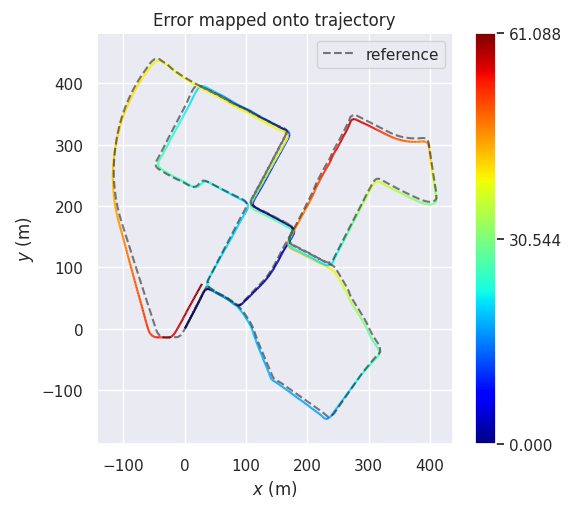
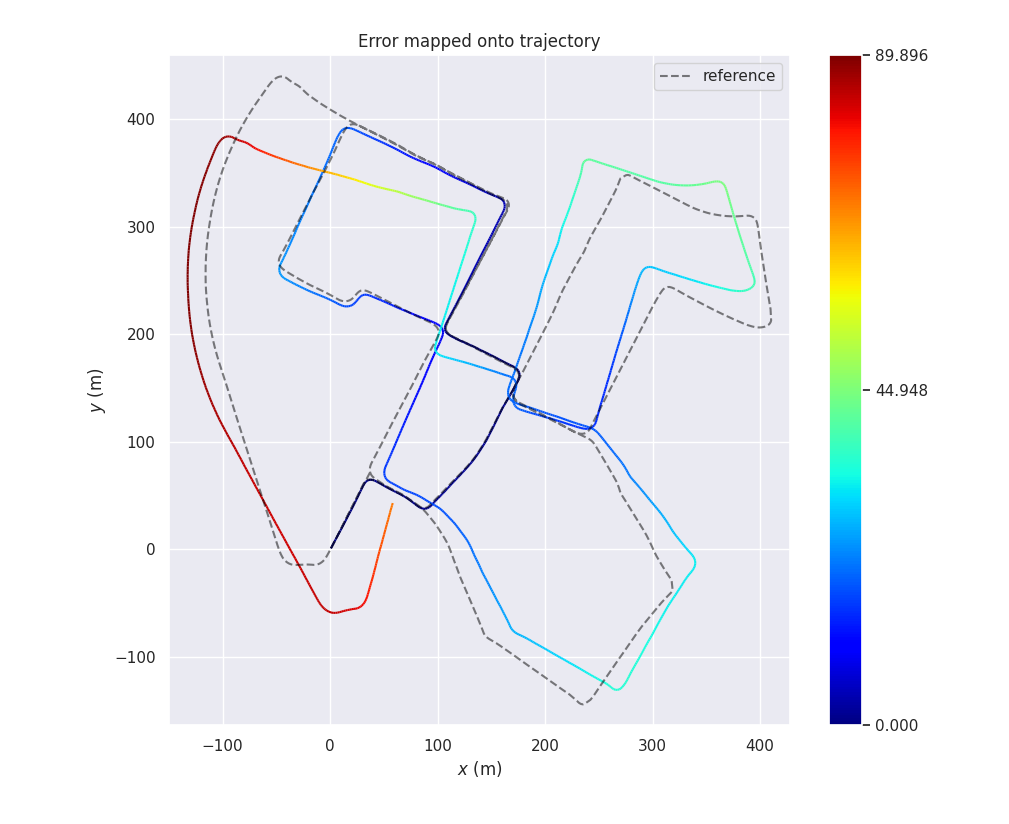
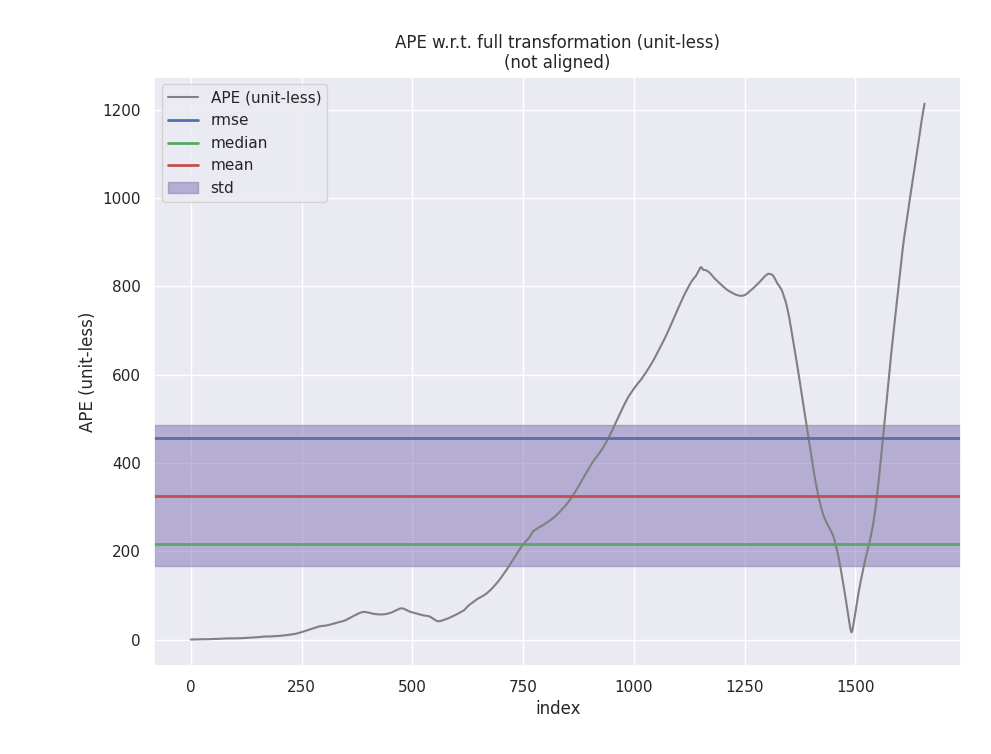
PCL-NDT
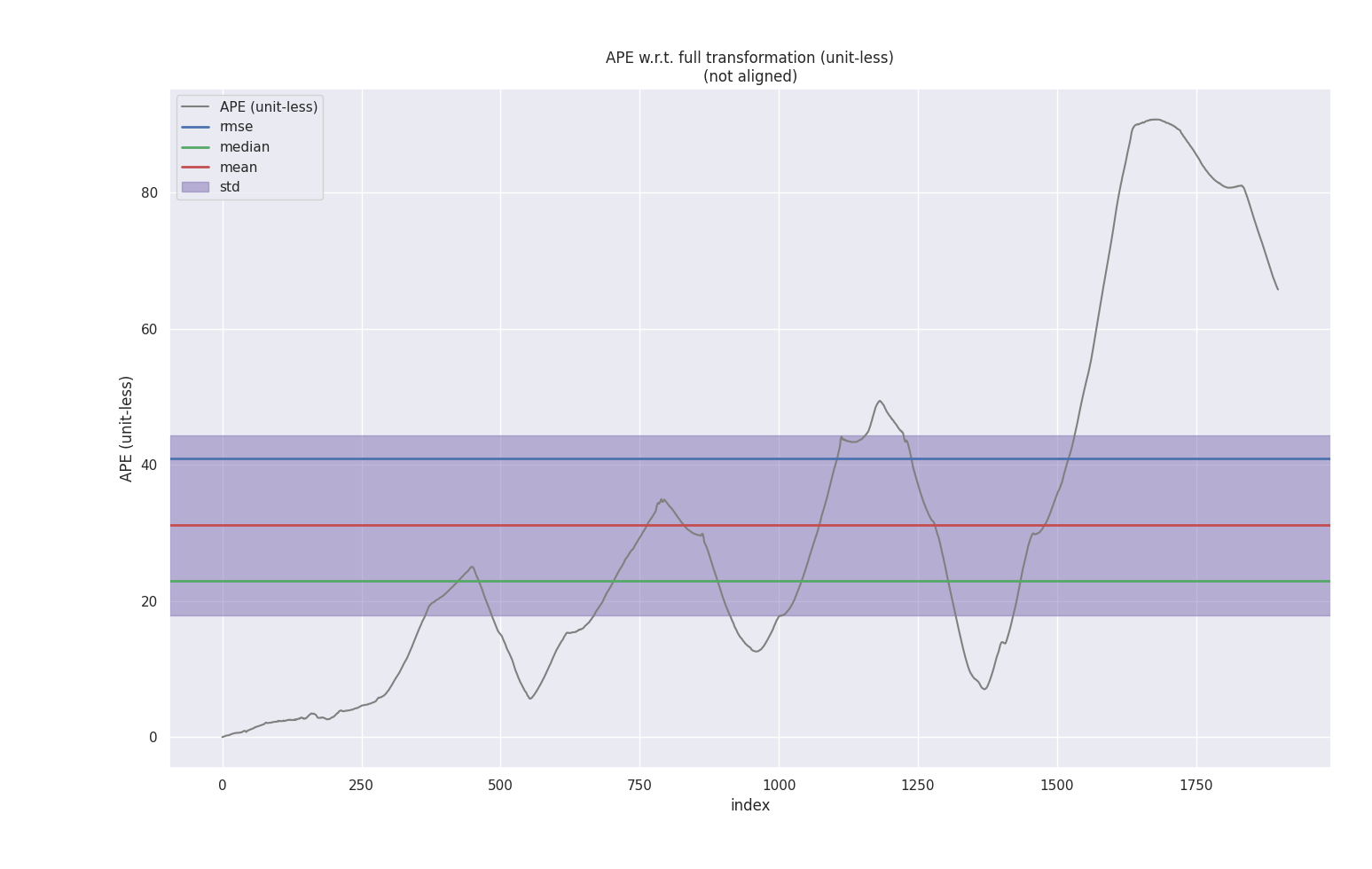
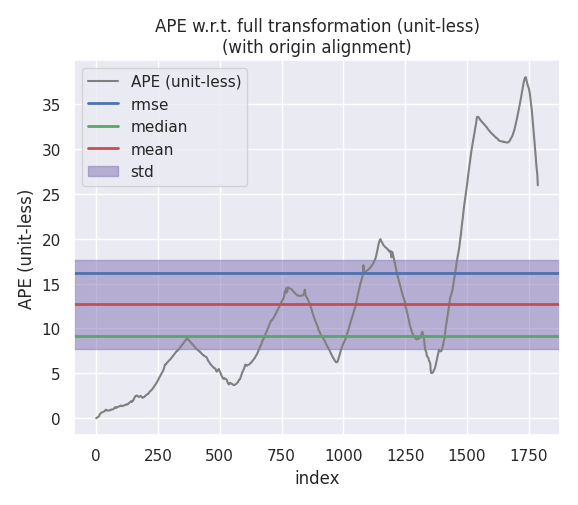
绝对位姿误差(APE)
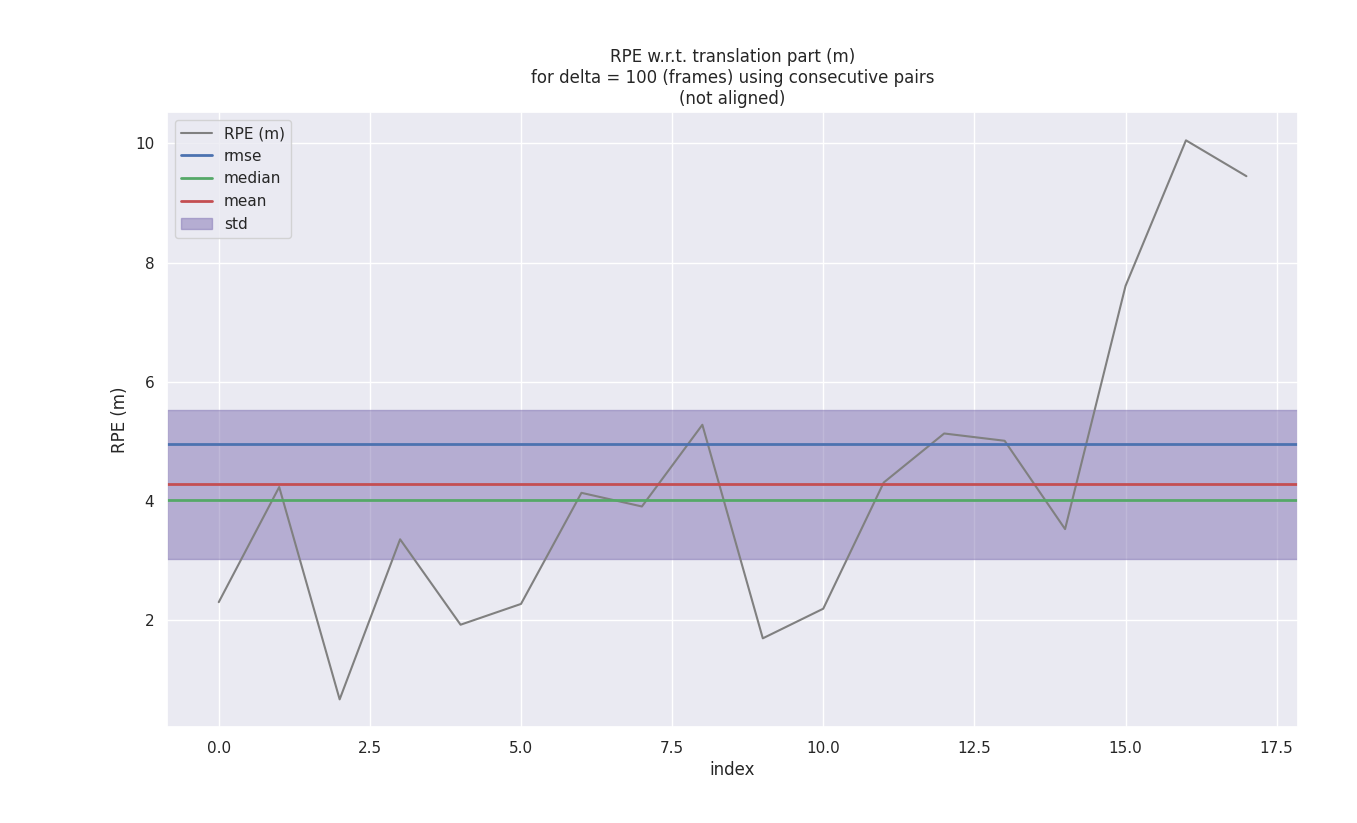
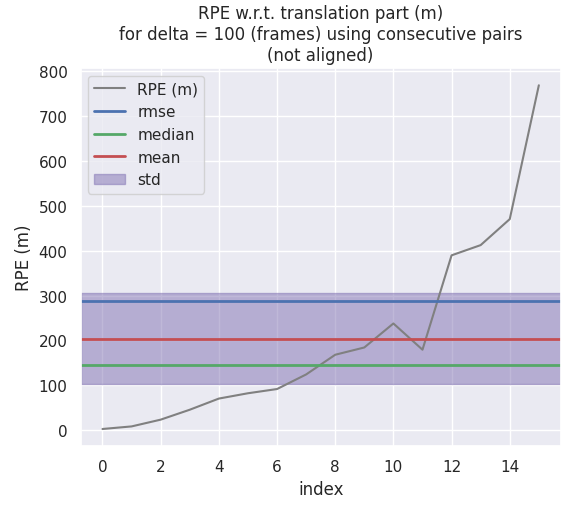
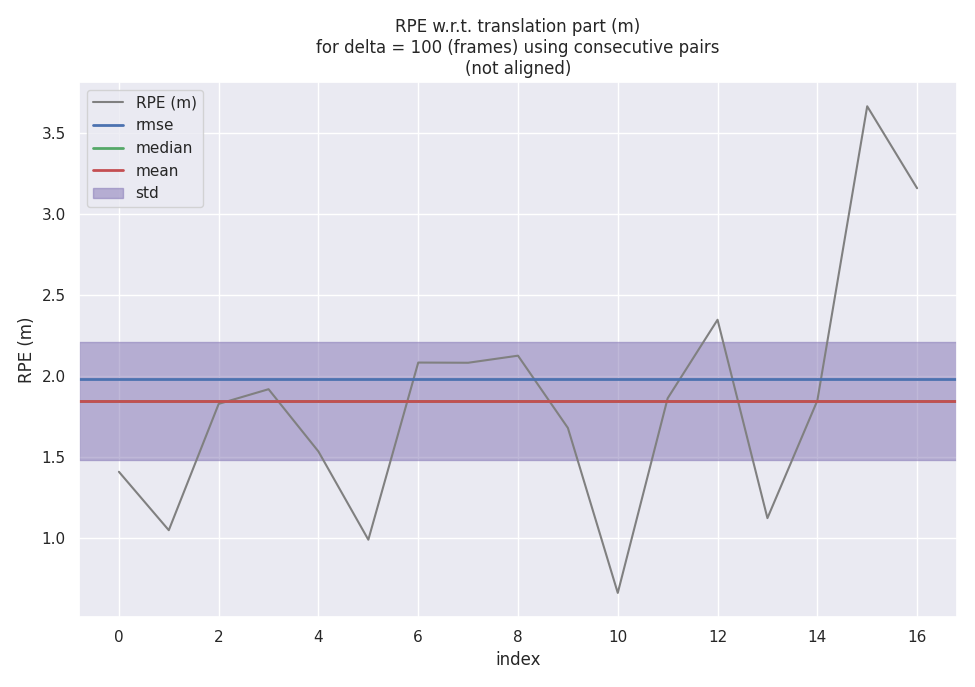
相对位姿误差(RPE)
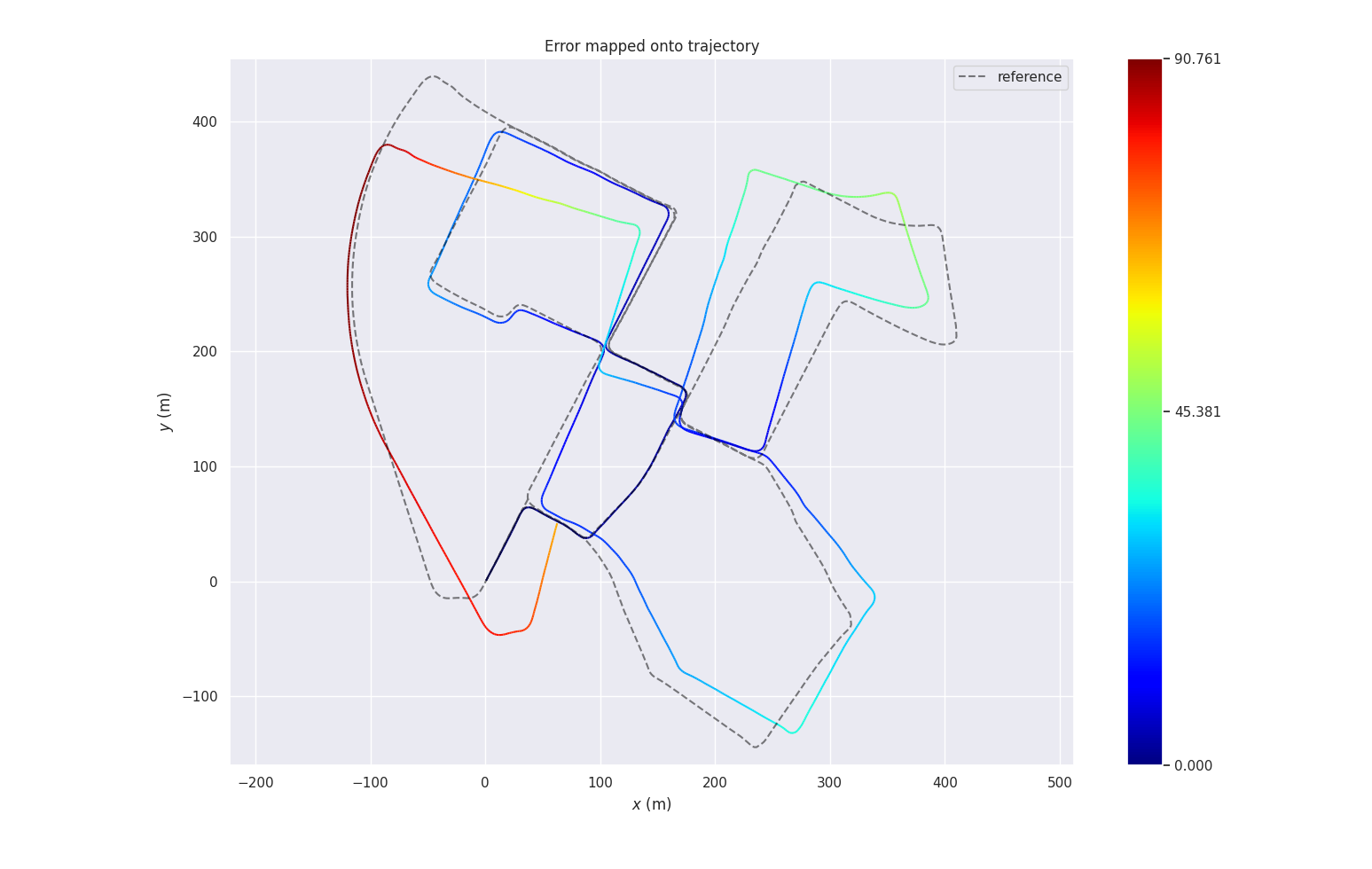
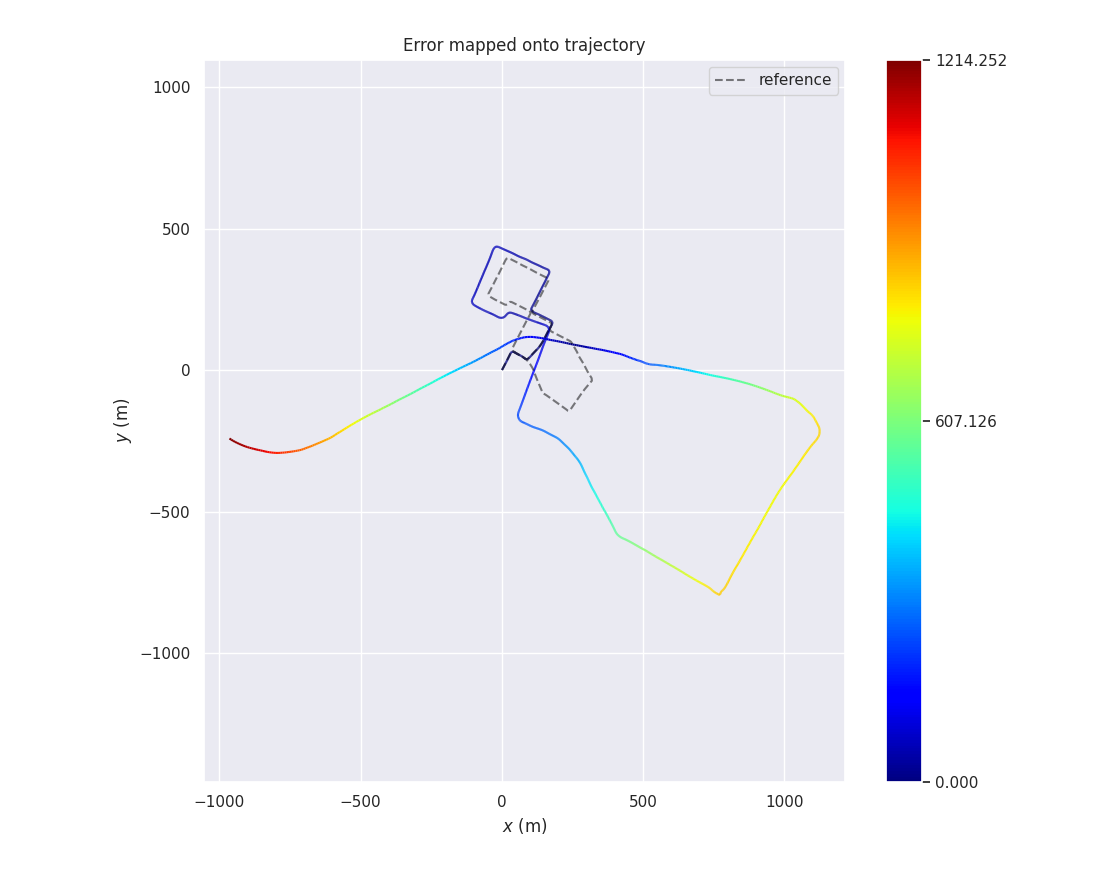
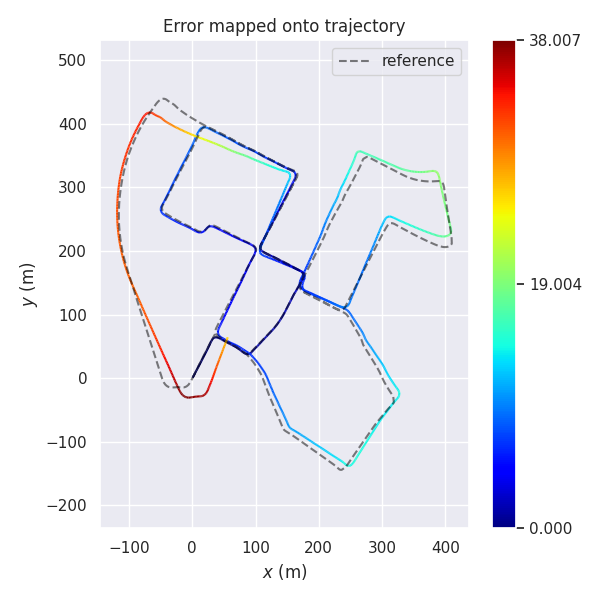
轨迹比较
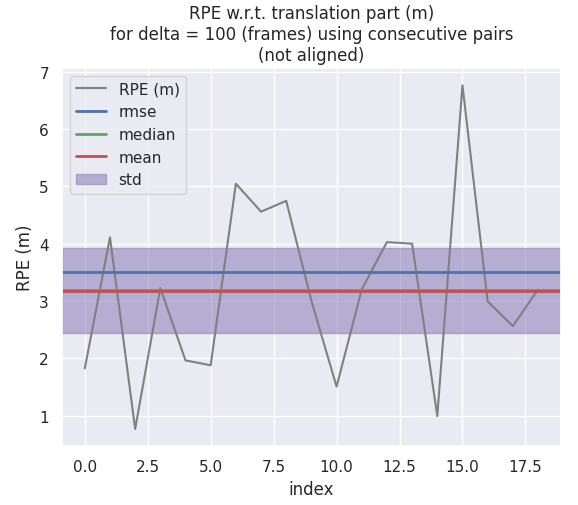
SVD-ICP
绝对位姿误差(APE)

相对位姿误差(RPE)
轨迹比较
GN-ICP
绝对位姿误差(APE)
相对位姿误差(RPE)
轨迹比较
PCL-ICP
绝对位姿误差(APE)
相对位姿误差(RPE)
轨迹比较
A-LOAM
在测试传统的 ICP/NDT 算法之后,想顺便比较一下基于 LOAM 系列的里程计的性能如何,于是乎简单将 A-LOAM 的输出也进行相似的比较,EVO 比较结果如下。不难看出,从各个参数来看基于 A-LOAM 的里程计都由于基于传统点云配准方法,当然 A-LOAM 本身输出的位姿也已经经过后端的优化,所以也能起到一定的校正作用。
绝对位姿误差(APE)
相对位姿误差(RPE)
轨迹比较
性能比较
首先说明的是,这个比较并不能说明哪种算法一定表现会更好,而只是针对某个测试集进行简单的定性测试。另外,从图也能看出,PCL 库中的 ICP 定位到最后漂移失败导致里程计崩溃了,这个目前不太清楚是什么原因,查了一下发现其他博主貌似也有类似的结论,因此考虑可能是 PCL 库中的 ICP 算法有 Bug,因此下面主要比较自己写的两个 ICP 算法以及 PCL 库中的 NDT 算法。
从绝对误差来看的话,NDT 性能最好,基于 SVD 和 GN 实现的 ICP 性能差别不大,此外观察以下可以看到,在前期三种的算法的精度都差不太多,是在某一处转弯之后出现了一点较大的漂移导致后面轨迹的发散。
评价里程计的漂移使用相对轨迹误差可能会更好一点,从相对轨迹误差误差来看的话,NDT 和 SVD-ICP 差别不大,而 GN-ICP 在最后有发散的迹象。
此外我还记录了每一种算法的平均耗时,NDT,SVD-ICP,GN-ICP 的平均耗时分别为:14.2579 ms, 17.9568 ms, 18.154 ms。NDT 和 ICP 之间的比较意义不太大(参数不一致),而 GN-ICP 的平均耗时略高于 SVD-ICP (5% 左右)。